Understanding PID Controllers in Drones
Introduction
Today’s drones appear effortless in sky hovering steadily, taking precise turns, and maintaining balance even in challenging environments like in high wind, rain etc. Behind this stability there a powerful control mechanism named as the PID controller.

PID (Proportional, Integral, Derivative) a fundamental concept from Control Systems Engineering and also useful as control algorithm used in flight controllers to keep drones stable, smooth, and responsive. Flight controller constantly reads sensors data like gyroscope, accelerometer and compare it with the desired position. using this data PID calculates the error and adjust the motor speeds to correct position
Key Pointer
- PID is an algorithm used by flight controller
- PID keeps adjusting motor speed to correct the drone’s movement and keep it stable
- It helps the drone to maintain required altitude level, roll, pitch and yaw and follow the pilot’s commands smoothly
Why PID is required in Drone
Consider you want a drone to hover in the air at a specific altitude. The drone uses its propellers to generate an upward force that counteracts the force of gravity pulling it down. The drone can adjust the propeller speed based on the drone’s current position and velocity with other controllers i.e. proportional and derivative controllers but without an integral controller, the drone would struggle to maintain a stable hover position.
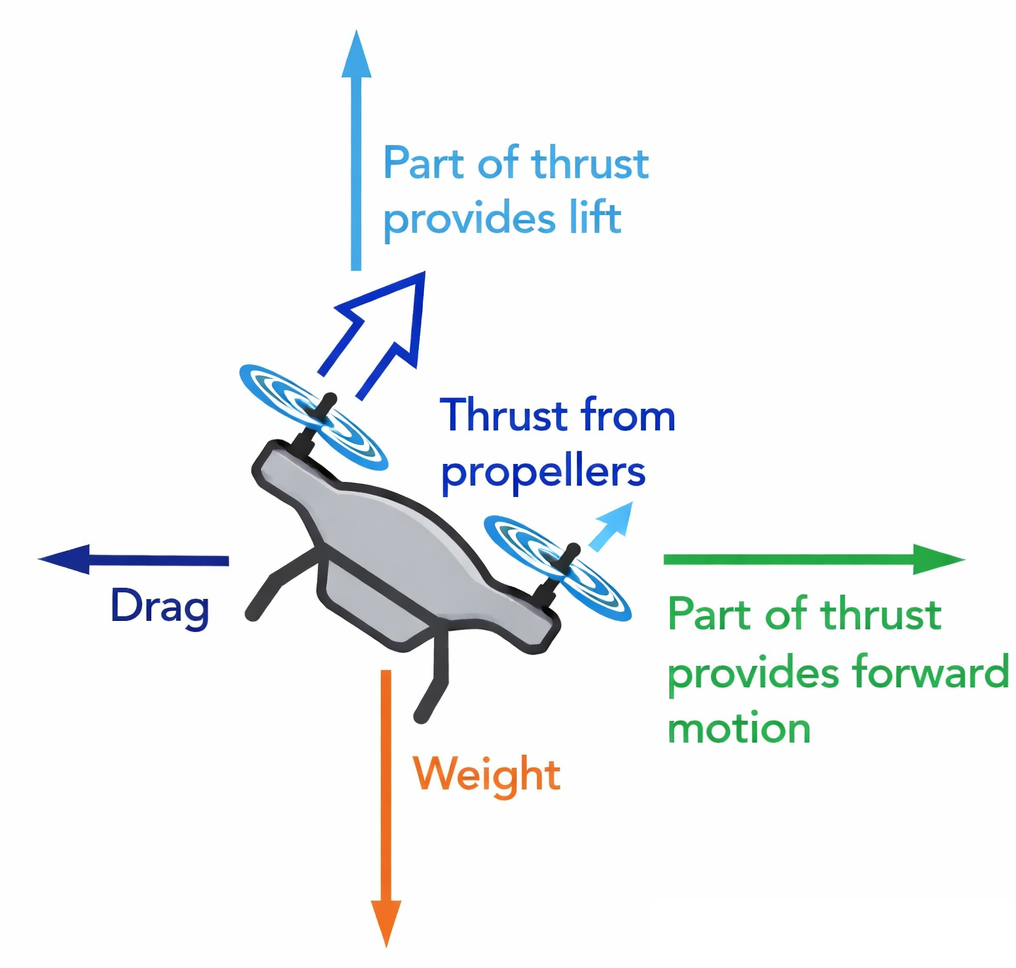
To stay at a certain height in the air, like how a helicopter hovers, it uses its propellers to create an upward force that balances out the force of gravity pulling it down. But sometimes, there can be some small problems, can wind might push the drone up or the propellers might not work exactly as expected. This can make a small change in the force so the drone goes slightly higher or lower than the desired height. To fix this, the drone has smart controllers, these controllers are “proportional“, “derivative” and “integral” controllers. So following are some point why we need PID controllers.
- To provide reliable flight stability PID keeps the drone stable in air
- For reliable flight stability, it provide smooth and controlled movements
- PID helps in precision control and efficient real-time response to reduces vibration and oscillations result in longer component life.
- PID provides resistance to disturbances like wind and weight which helps in improved accuracy for camera, mapping and racing
- PID enables efficient use of power so longer flight time
Proper PID tuning + correct motor–prop matching = Safe, efficient, and reliable drone performance.
PID Formula
The PID Control system easy to understand formula is shown here. It is consist of three components Proportional, Integral and Derivative.

- P (Proportional) component term is for current error and used for the Instant correction based on current error. A high P results in fast correction and helps in quick response but excessive high P can leads to oscillations.
- I (Integral) component looks for past accumulated errors and fixes the small steady errors (drift) over time to ensure the long term accuracy.
- D (Derivative) component is used to predicts future error based on the rate of change. It reduced the overshoot, dampens the oscillations and provides smooth and stable motion. It acts similar to breaking system to control the flight.
How does PID Works
Drone stabilization is achieved through a continuous fast feedback loop driven by onboard sensors, primarily known as Inertial Measurement Unit (IMU). This includes sensors like gyroscopes and accelerometers.
When the drone pilot provides an input like instructing the drone to move forward, the flight controller interprets this as a desired change in orientation, typically a target pitch angle. The sensors measures the drone’s current orientation and motion in real time.
The PID controller then compares this actual state with the desired setpoint to calculate the error. Based on this error, the PID algorithm computes corrective actions by combining proportional (current error), integral (accumulated past error), and derivative (rate of change of error) responses.
These corrections are translated into precise motor speed adjustments speeding up some propellers while slowing others to achieve the intended motion and maintain stability. This entire process forms a closed-loop control system that runs hundreds to thousands of times per second, allowing the drone to continuously self-correct, resist disturbances like wind, and maintain smooth, stable flight with high precision.
This simple working can be illustrated using following 5 steps:
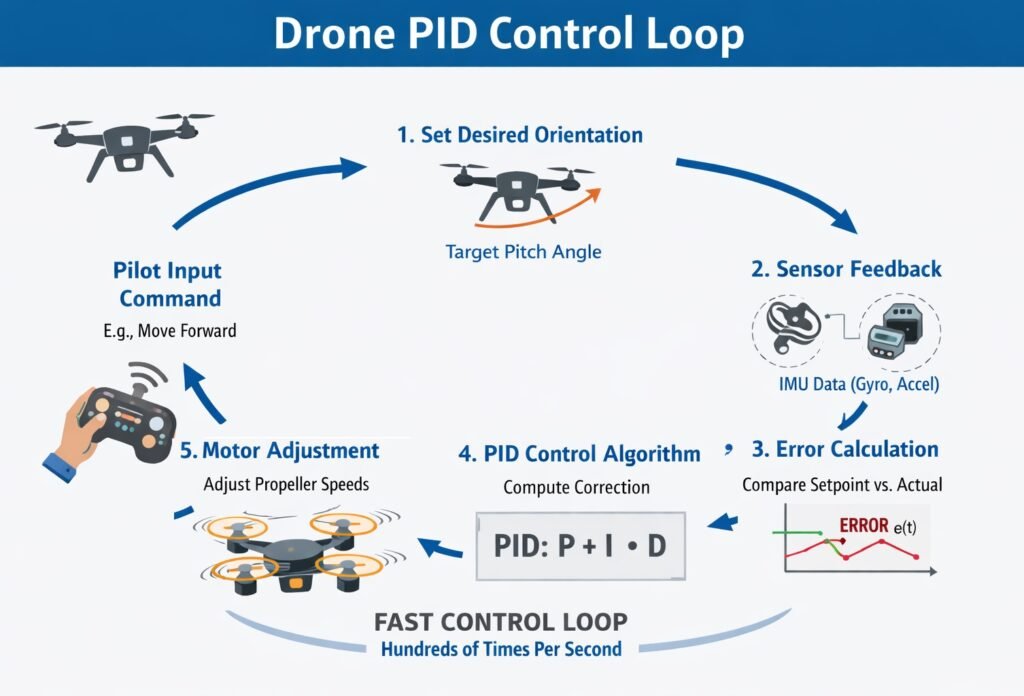
- Pilot inputs a command (e.g., move forward)
- Desired orientation is set (target pitch angle)
- Sensors measure actual orientation
- PID calculates error
- Flight controller adjusts motor speeds accordingly
Multi-Axis and Advanced PID Control
Modern drones does not work on single controller rather rely on multi-axis PID control for precise and stable flight across all directions of motion. Each critical axis roll (X-axis), pitch (Y-axis), yaw (Z-axis), and altitude is governed by its own dedicated PID loop, all operating simultaneously to maintain balance and respond accurately to pilot inputs or autonomous commands.
These parallel control loops continuously process real-time data from onboard sensors, ensuring coordinated adjustments in motor speeds for smooth and stable maneuvering. In advanced drone systems, PID control is further enhanced through sophisticated techniques such as cascaded PID loops, where separate controllers manage angle and angular rate for finer control dynamics, and adaptive or self-tuning PID systems that automatically optimize performance under changing conditions.
Additionally, modern drones increasingly integrate PID with AI-driven algorithms for autonomous navigation and decision-making, while more advanced control strategies like Model Predictive Control (MPC) are being explored to handle complex, dynamic environments with greater efficiency and precision.
Conclusion
PID controllers transform complex sensor data into precise motor commands, allowing drones to fly with remarkable stability and accuracy. Whether in hobby drones or advanced UAV systems, PID remains the backbone of flight control.